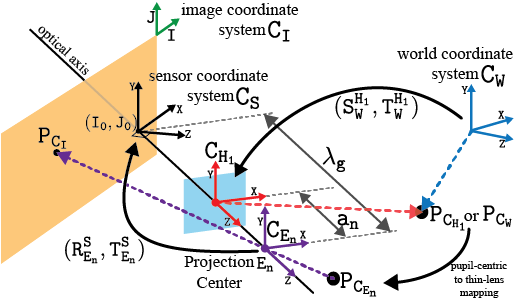
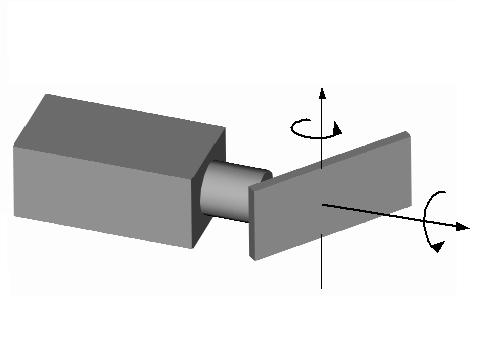
In this work, we propose analytical solution to non-frontal camera calibration in a generalized pupil-centric imaging framework. The decentering distortion is explicitly modelled as a sensor rotation with respect to the lens plane. The rotation parameters are then computed analytically along with other calibration parameters. The centre of radial distortion is then computationally obtained given the analytical solution.